Interception¶
import numpy as np
from sympy import *
x, y, z, t = symbols('x y z t')
import matplotlib.pyplot as plt
# incoming projectile A
rAi = [0, 3]
vAi = [8*cos(40*pi/180).n(), 8*sin(40*pi/180).n()]
# intercepting projectile B
rBi = [10, 0]
angleB = (180-50)*pi/180 # in radians; relative to positive x-axis
rAi, vAi
([0, 3], [6.12835554495182, 5.14230087749231])
def calculate_speed(rAi, vAi, rBi, angleB):
"""
Calculate the speed of the inercepting projectile B.
"""
pass
def motion_step(ri, vi, a, tstep=0.01):
"""
Calculate vf from vi + \int a, and rf from r + \int v.
"""
vf = vi + a*tstep
rf = ri + vi*tstep + 0.5*a*tstep**2
return [rf, vf]
def motion(ri, vi, a=[0,-9.81], ti=0, tf=1.0, tstep=0.001):
"""
Compute the motion of an object with initial position ri (2d vector),
initial velocity vi (2d vector), and acceleration
undergoing acceleration `a` (2d vector), between `ti` and `tf`.
Returns times (list) and trajectory (list) [`r(ti)`, ... , `r(tf)`].
"""
ri, vi, a = np.array(ri), np.array(vi), np.array(a)
times = []
trajectory = [] # list of positions (2d vectors)
# t = ti
trajectory.append(ri)
rt, vt = ri, vi
# t > ti
for t in np.arange(ti+tstep, tf, tstep):
rt, vt = motion_step(rt, vt, a=a, tstep=tstep)
trajectory.append(rt)
return times, trajectory
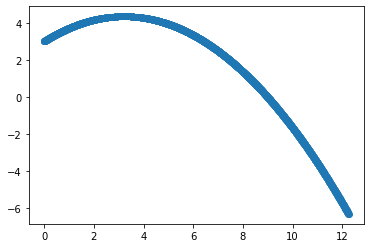
t, trajA = motion(rAi, vAi, tf=2)
xA, yA = zip(*trajA)
plt.scatter(xA, yA)
<matplotlib.collections.PathCollection at 0x7f89fbfa89d0>
from IPython.display import HTML
from matplotlib.animation import FuncAnimation
import numpy as np
t = np.linspace(0, 2*np.pi)
x = np.sin(t)
fig, ax = plt.subplots()
ax.axis([0,2*np.pi,-1,1])
l, = ax.plot([],[])
def animate(i):
l.set_data(t[:i], x[:i])
ani = FuncAnimation(fig, animate, frames=len(t), interval=50)
plt.close()
HTML(ani.to_jshtml())